
Real Time Underwater Obstacle Avoidance and Path Re-planning Using Simulated Multi-beam Forward Looking Sonar Images for Autonomous Surface Vehicle
DOI:
https://doi.org/10.4186/ej.2015.19.1.107Keywords:
Underwater obstacle avoidance, real-time path re-planning, A* algorithm, sonar image, ASV.Abstract
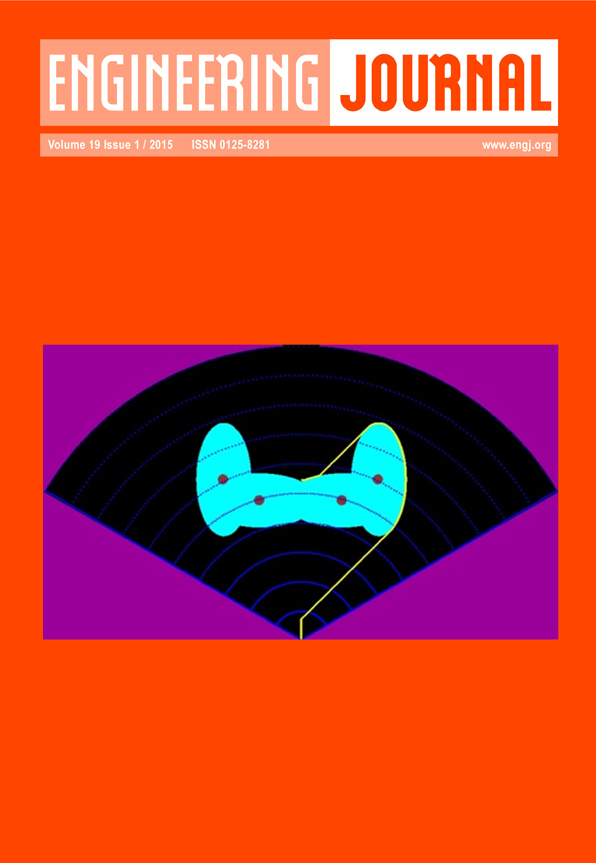
This paper describes underwater obstacle avoidance and path re-planning techniques for autonomous surface vehicle (ASV) based on simulated multi-beam forward looking sonar images. The sonar image is first simulated and then a circular obstacle is defined and created in the field of view of the sonar. In this study, the robust real-time path re-planning algorithm based on an A* algorithm is developed. Our real-time path re-planning algorithm has been tested to regenerate the optimal path for several updated frames with a proper update frequency between the start point and the goal point both in static and dynamical environments. The performance of proposed method is verified through simulations, and tank experiments using an actual ASV. While the simulation results are successful, the vehicle model can avoid both single obstacle, multiple obstacles and moving obstacle with the optimal trajectory. For tank experiments, the proposed method for underwater obstacle avoidance system is implemented with the ASV test platform. The vehicle is controlled in real-time and moderately succeeds in its avoidance against the obstacle simulated in the field of view of the sonar together with the proposed position stochastic estimation of the vehicle.
Downloads
Downloads

Authors who publish with Engineering Journal agree to transfer all copyright rights in and to the above work to the Engineering Journal (EJ)'s Editorial Board so that EJ's Editorial Board shall have the right to publish the work for nonprofit use in any media or form. In return, authors retain: (1) all proprietary rights other than copyright; (2) re-use of all or part of the above paper in their other work; (3) right to reproduce or authorize others to reproduce the above paper for authors' personal use or for company use if the source and EJ's copyright notice is indicated, and if the reproduction is not made for the purpose of sale.







