
A Dynamic Model for Simulating Elephant-Lifting by Using a Tilting Frame
DOI:
https://doi.org/10.4186/ej.2020.24.5.195Keywords:
Multi-body dynamic, elephant, joint, tilt-lifting, mechanismAbstract
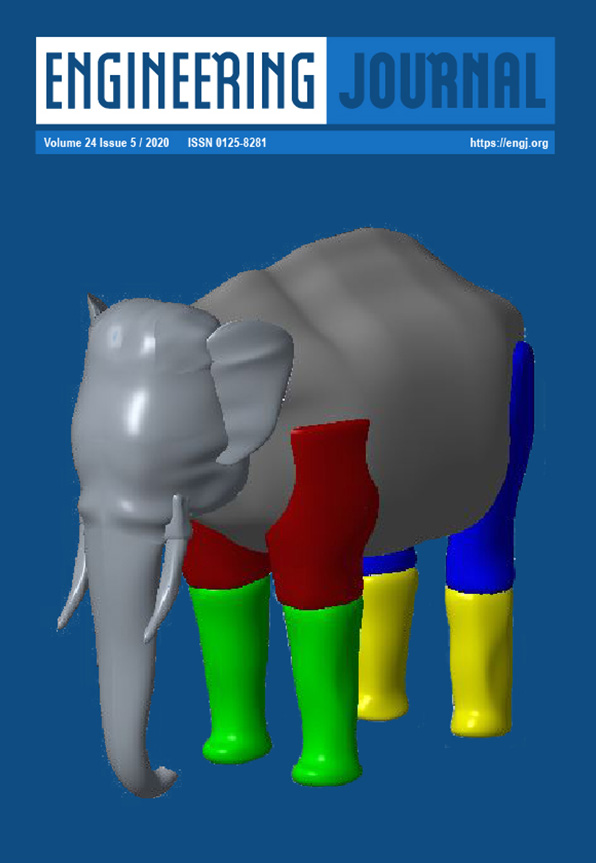
A rigid multi-body dynamic model of an elephant was developed for motion analysis during tilt-lifting. The elephant lifting to standing position is required by veterinarians to perform surgery and bedsores treatment. The elephant mechanism dynamic model (EMDM) was developed by simplifying the skeleton to simple straight linkages connected by joints. The model consisted of 10 bones and 9 joints. A mechanical harness model (MHM) was developed. Two harnesses were attached to the tilt-frame mechanism model (FMM) and the EMDM; this assembly became the elephant dynamic during tilt-lifting model (EDTM). The developed EDTM permitted us to observe the displacement, velocity, and acceleration responses at any location on the elephant. The model allowed the virtual study of the motion, and avoided the real elephant testing; thus, the cost, time, and resources were reduced and no conflict with the animal experimental ethics. The simulation was found to be a valuable tool for engineers to design a suitable elephant bed. It permitted us to observe the operation, safety, and precaution of the equipment.
Downloads
Downloads

Authors who publish with Engineering Journal agree to transfer all copyright rights in and to the above work to the Engineering Journal (EJ)'s Editorial Board so that EJ's Editorial Board shall have the right to publish the work for nonprofit use in any media or form. In return, authors retain: (1) all proprietary rights other than copyright; (2) re-use of all or part of the above paper in their other work; (3) right to reproduce or authorize others to reproduce the above paper for authors' personal use or for company use if the source and EJ's copyright notice is indicated, and if the reproduction is not made for the purpose of sale.







