
Mechanical Power to Identify Human Performance for a Lower Limb Rehabilitation Robot
DOI:
https://doi.org/10.4186/ej.2019.23.4.91Abstract
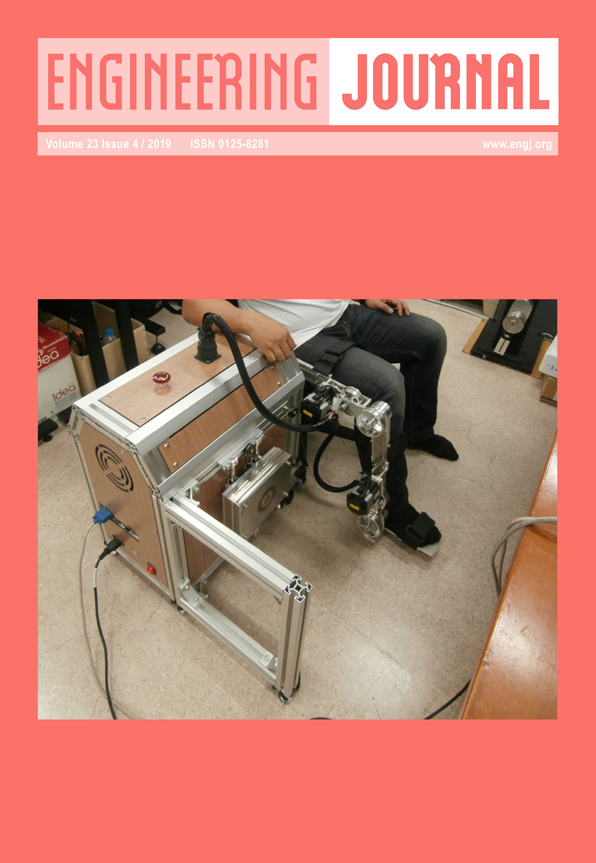
Rehabilitation robots usually provide trainings with a certain training modality and activity. The patient’s performance measure such as mechanical power is also derived for those specific trainings. This article aims to demonstrate the implementation of our lower limb rehabilitation robot in sitting position for providing the training with games and to propose the derivation of the human mechanical power as a performance measure. The control algorithm for active exercise and the integration of the related software and hardware are also developed to offer proper environment for a game session. The derivation of the mechanical power of a human subject in the training is verified with active and passive cycling exercises. Three healthy subjects participate in the game sessions provided by the robot. It is found that the game sessions can provide the movement training with sufficient intensity. Moreover, the mechanical power obtained from the proposed method is able to identify the intensity of training tasks, human performance, and human attention in the training.
Downloads
Downloads

Authors who publish with Engineering Journal agree to transfer all copyright rights in and to the above work to the Engineering Journal (EJ)'s Editorial Board so that EJ's Editorial Board shall have the right to publish the work for nonprofit use in any media or form. In return, authors retain: (1) all proprietary rights other than copyright; (2) re-use of all or part of the above paper in their other work; (3) right to reproduce or authorize others to reproduce the above paper for authors' personal use or for company use if the source and EJ's copyright notice is indicated, and if the reproduction is not made for the purpose of sale.







