
A Novel Design and Implementation of a 4-DOF Upper Limb Exoskeleton for Stroke Rehabilitation with Active Assistive Control Strategy
DOI:
https://doi.org/10.4186/ej.2017.21.7.275Abstract
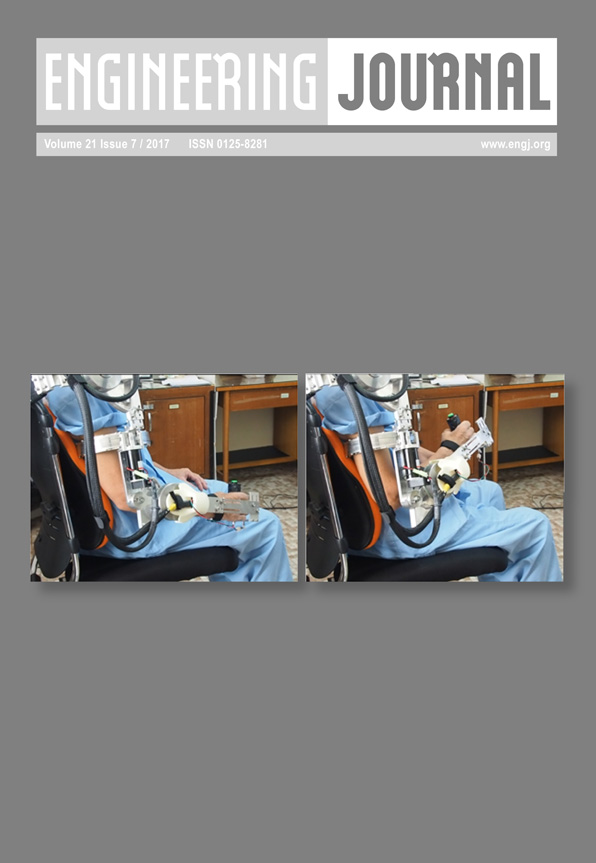
We developed a robot, CUREs (Chulalongkorn University Rehabilitation Robotic Exoskeleton system), for upper extremity rehabilitation. The active assistive control strategy based on the impedance force control is developed and implemented to obtain assistive-resistive paths tracking for rehabilitation activities. The desired trajectory or rehabilitated training pattern for each specific patient need to be assigned first by a medical doctor and a physical therapy. The therapist can program the desired trajectory by guiding the patient arm based on the assigned path pattern and the set of via points will be stored and used for generating the desired trajectory. The desired trajectory will be stored specific for the patient and can be called back anytime. During the rehabilitation, the robot can assist and resist the patient’s arm to follow the desired trajectory. If the patient has difficulty moving his arm to track the desired path, the robot will help by adding more torque to help the patient to move his arm to reduce the error between the desired path and the actual posture. And if the patient himself can move his arm tracking the desired path, the robot will not apply any more force to assist or resist. The necessary state variables such as angular position and torque can be recorded during the training. The main purpose of the experiment, follow the medical ethic, is to assure that there is no side effect for using this rehabilitation robot. Five subacute stroke patients participated in this pilot study. All patients have severe upper extremity weakness. The medical doctor will assign the training pattern based on patient condition. The result showed that the Fugl-Meyer Assessment Upper Extremity Scale was improved after 10 days of training in all participants without any sign of side effect.
Downloads
Downloads

Authors who publish with Engineering Journal agree to transfer all copyright rights in and to the above work to the Engineering Journal (EJ)'s Editorial Board so that EJ's Editorial Board shall have the right to publish the work for nonprofit use in any media or form. In return, authors retain: (1) all proprietary rights other than copyright; (2) re-use of all or part of the above paper in their other work; (3) right to reproduce or authorize others to reproduce the above paper for authors' personal use or for company use if the source and EJ's copyright notice is indicated, and if the reproduction is not made for the purpose of sale.







